

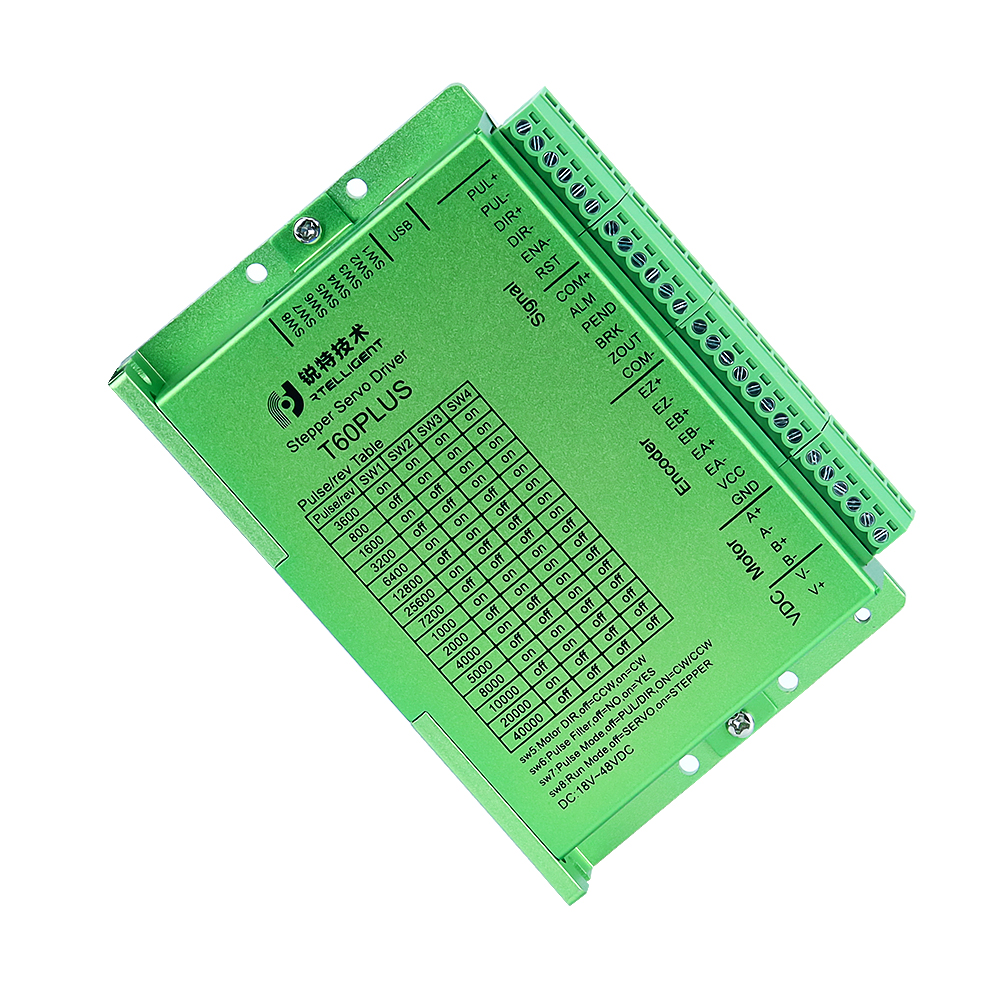


Impulsus Moderatio Biphasica Gradus Circuitus Clausi T60Plus


Introductio Producti



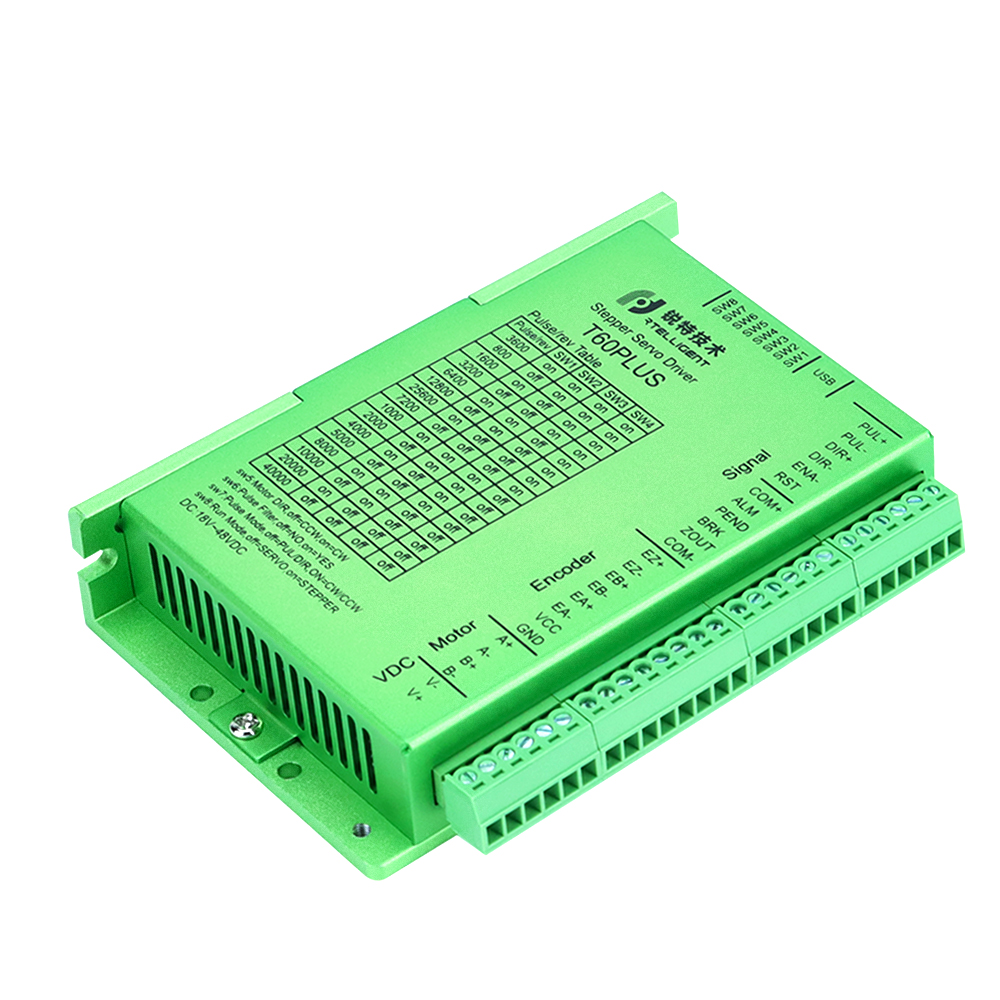
Nexus

Proprietates
| Fons potentiae | 18~48VDC |
| Praecisionem moderari | 4000 Pulsus/r |
| Modus pulsatilis | Directio et impulsus, impulsus duplex CW/CCW, impulsus quadratus A/B |
| Imperium currentis | Algorithmus moderationis vectoris servo |
| Constitutio subdivisionis | Constitutio commutatoris DIP, 15 optiones (vel constitutio programmatis debugging) |
| Ambitus celeritatis | Consuetudinaria 1200~1500rpm, usque ad 4000rpm |
| Suppressio resonantiae | Computatio automatica puncti resonantiae ad vibrationem mediae frequentiae supprimendam |
| Adaptatio parametri PID | Programma debugging ad proprietates PID motoris adaptandas |
| Filtrum impulsuum | Filtrum signalis digitalis 2MHz |
| Exitus alarmis | Exitus alarmis pro nimia currentia, nimia tensione, errore positionis, etc. |
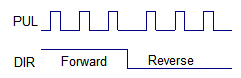
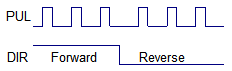
Modus Pulsus
Interfacies signorum impulsorum seriei T ordinariorum formam impulsuum habet, et T60PLUS V3.0 tria genera signorum imperii impulsuum accipere potest.
| Pulsus et directio (PUL + DIR) |
|
| Impulsus duplex (CW + CCW) |
|
| Impulsus orthogonalis (impulsus orthogonalis A/B) | 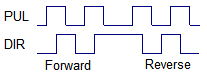 |
Ordo Micro-graduum
| Pulsus/revolutio | SW1 | SW2 | SW3 | SW4 | Observationes |
| 3600 | on | on | on | on | Commutator DIP ad statum "3600" vertitur et programmata probationis libere alias subdivisiones mutare possunt. |
| DCCC | exstinctus | on | on | on | |
| 1600 | on | exstinctus | on | on | |
| 3200 | exstinctus | exstinctus | on | on | |
| 6400 | on | on | exstinctus | on | |
| 12800 | exstinctus | on | exstinctus | on | |
| 25600 | on | exstinctus | exstinctus | on | |
| 7200 | exstinctus | exstinctus | exstinctus | on | |
| mille | on | on | on | exstinctus | |
| MM | exstinctus | on | on | exstinctus | |
| Quadringenta milia | on | exstinctus | on | exstinctus | |
| Quinque milia | exstinctus | exstinctus | on | exstinctus | |
| Octo milia | on | on | exstinctus | exstinctus | |
| Decem milia | exstinctus | on | exstinctus | exstinctus | |
| Viginti milia | on | exstinctus | exstinctus | exstinctus | |
| Quadringenta milia | exstinctus | exstinctus | exstinctus | exstinctus |
Ordo Micro-graduum
Terminales impulsorum exusti sunt?
1. Si inter terminales circuitus brevis est, inspice num convolutio motoris circuitum brevem habeat.
2. Si resistentia interna inter terminales nimis magna est, quaeso inspice.
3. Si nimia ferruminatio additur nexui inter fila ut pila ferri formatur.
Impulsor gradualis circuli clausi alarmum habet?
1. Si error connexionis in filis encoderis apparet, fac ut fune extensionis encoderis correcto utaris, vel Rtelligent contacta si fune extensionis ob alias causas uti non potes.
2. Inspice num codificator laesus sit, velut egressus signalis.
-
 Manual Usoris Rtelligent T60PLUS V3.0
Manual Usoris Rtelligent T60PLUS V3.0




